


“智能无人系统感知与导航联合实验室”是上海北斗导航研发与转化功能型平台倾力打造的一个智能无人系统高精度融合导航控制测试试验场,该试验场位于上海市青浦区高光路北斗产业园1号楼,分为室内测试场和室外测试场两部分。


测试场主要面向单元传感器、多元传感器融合技术及基于融合导航的低速智能无人系统,提供标准测试、非标准测试、定制化测试、多场景数据集等完整的测试服务。同时针对典型场景下导航定位、环境感知、规划控制性能等提供精确测量和性能评估,形成相关的测试标准与测试评估能力。
室内测试场主要利用光学空间定位系统,主要60多个高精度动态捕捉相机组成,可提供室内高精度定位能力,精度可达亚毫米级,用作测试的真值。同时测试场备有蓝牙定位技术可提供毫米级的定位,室内UWB技术可提供室内厘米级定位需求。
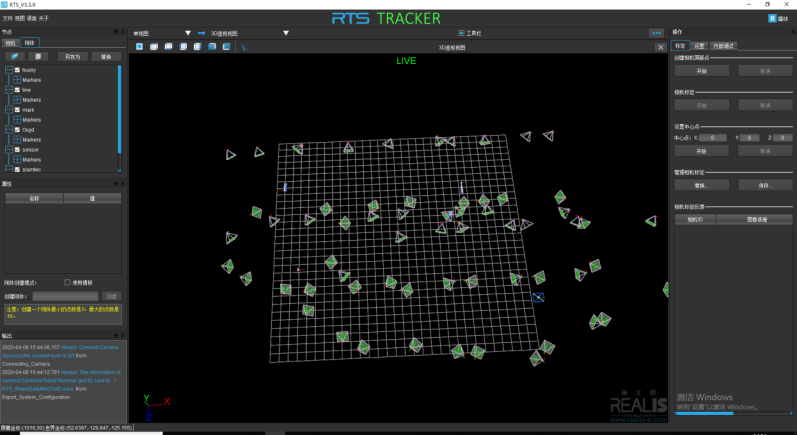
RTS目标跟踪软件
室外测试场利用高精度测量设备全站仪,可用于无人机的位置追踪;
目前测试试验场所有的测试能力建设的前提是已搭建完一套完整的时间同步及空间坐标统一系统,以此为标定系统可提供的测试服务如下:
传感器测试
可测试传感器包括视觉(RGB/RGBD/TOF)、激光雷达、毫米波雷达、IMU等主流辅助高精度导航传感器,通过测试传感器在静态或动态条件下的视觉成像、定位、测距、测资、侧向、目标识别能力。
低速直线导轨
具备远程无线控制、时间同步、数据记录等功能,三个自由的(直线运动、旋转运动、俯仰运动),用于测试传感器在不同运动状态下的性能。
低速直线导轨
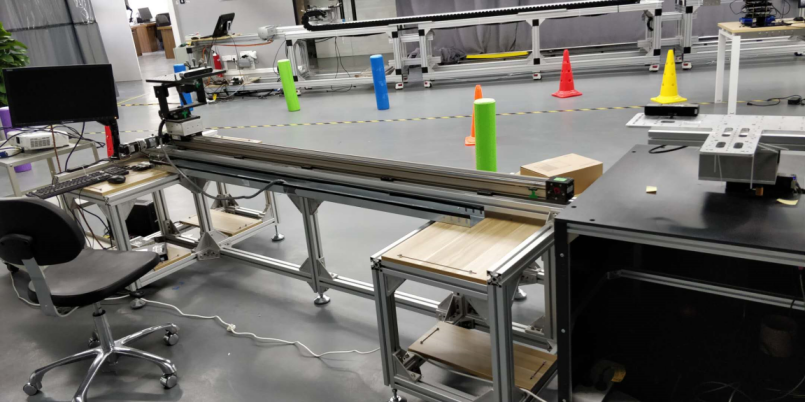
高速直线导轨
高速直线导轨,最大速度7.8m/s,最大加速度 ,最大运动范围7m。

高速直线导轨
圆形导轨
具备远程无线控制、时间同步、数据记录等功能,主要用于对传感器性能的重复性测试,最大速度1m/s。
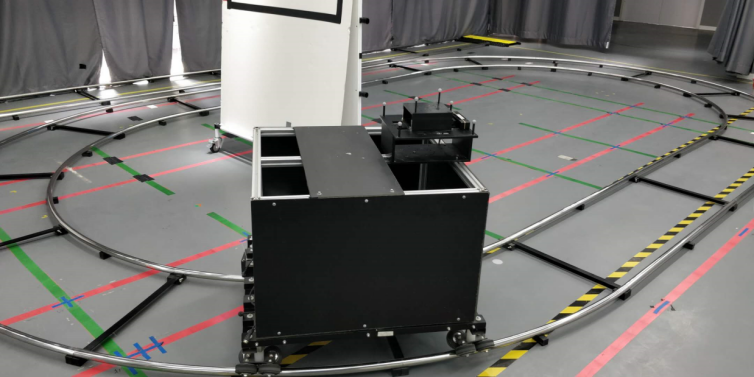
圆形导轨
灯光系统
可调节照明系统可以满足10s内灯光亮度从明亮(500Lux)逐渐调整至微弱(0.02Lux)模拟无人战场过隧道的场景,该设备系统目前国内仅一家,并且该测试方案已经成功为军方某项目完成了测试服务。同时设备具备网络通讯功能,能够要成操作,并进行时间同步。
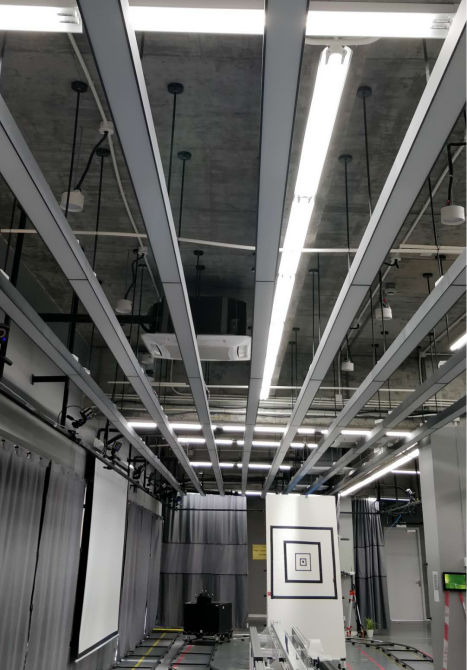
灯光系统
机器人测试
机器人本身可作为传感器设备的硬件搭载平台,测试目的是针对地面低速智能机器人提供测姿测距、测速测向、目标识别、建图能力、路径规划、避障能力等定位导航和环境感知方面的测试及评估服务,测试场景包括由规则物体与非规则物体组成的基础测试场景,以及物流、办公、居家等在内的行业测试场景。
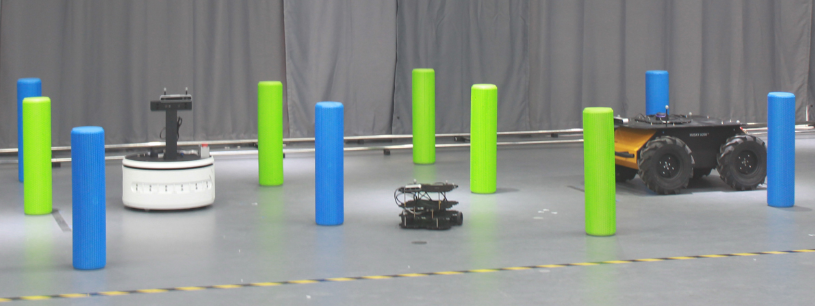
机器人基础测试场景
无人系统虚拟仿真系统
在一款基于Unreal Engine构建的虚拟无人机、无人车可搭载真实传感器的虚拟真实场景的平台上进行自动驾驶的仿真控制。

无人车仿真界面

无人机仿真界面
SensorBox
SensorBox 是一款自主研发的可定制化多传感器融合的数据采集设备,已完成多元传感器融合算法研究,可包含的传感器主要有:IMU、双目、GNSS(U-blox板卡)、激光雷达、蓝牙、wifi等,主要可用于搭载在无人系统设备上,完成数据采集、融合算法研究。

无人机搭载Sensorbox
北斗导航研发与转化功能型平台通过标定精度与维度、覆盖的场景类型与规模、数据集完备性、智能评测四个方面打造国际一流的、标杆性的智能无人系统高精度导航定位综合试验场,引领智能无人系统高精度环境感知、定位导航技术的集群创新和产业集聚发展。