
News detail
新闻详情
3D视觉相机测距能力评测
上海西虹桥导航技术有限公司和上海北斗导航创新研究院联合开展了业内产品的评测,在自有“高精度智能无人系统融合导航测试试验场”随机选取了业内知名公司的三款双目视觉相机进行功能和性能测试。
近年来随着智能无人系统的快速发展,双目立体视觉相机也受到了广泛关注与应用,其中基于双目立体视觉的测距技术是今后发展的一个重要方向,在医疗服务机器人、导引导览服务机器人、安防巡逻机器人等领域有着广泛的应用前景。
双目立体视觉测距首先使用相机拍摄图像进行匹配,根据匹配得出的视差图算出目标物的距离。为更好帮助研发企业的开发人员选择相机设备,上海北斗导航创新研究院和上海西虹桥导航技术有限公司联合开展了业内产品的评测,在自有“高精度智能无人系统融合导航测试试验场”(以下简称测试试验场)随机选取了业内知名公司的三款双目视觉相机进行功能和性能测试。
▲LeadSense(N1)

静态目标测距
将三款相机分别固定安装在直线导轨上,正前方摆放目标物,然后分别对三款相机进行目标物的静态测距试验。 每款相机随机选取4个不同距离1.6m、3.1m、4.6m、6.6m轮流进行测试,最后将从相机SDK中获取的值(通过相机的点云图获取距离值)与高精度光学动态捕捉系统的真值进行比对,同时每次测试前真值设备与相机都会进行一次时间同步和坐标系统一。
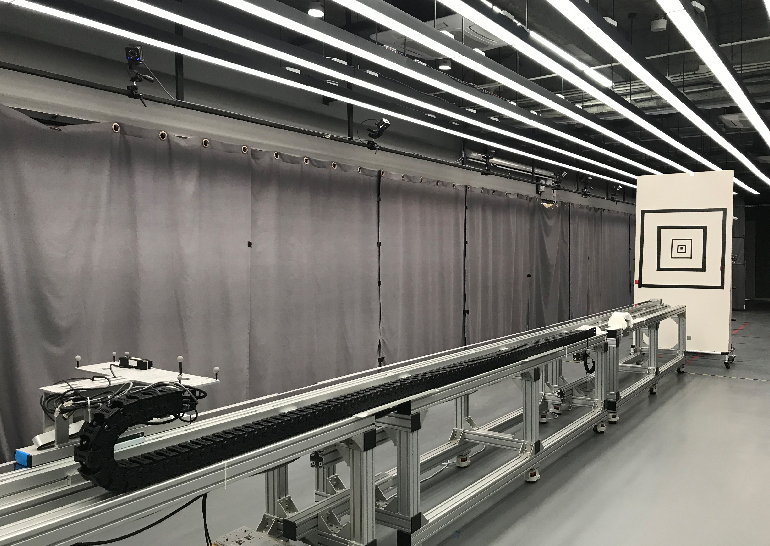
▲直线轨道测试台
三款相机的真值标定原点统一固定于相机的左目摄像头上方。

▲视觉相机测试场景图
测试时各个相机的参数的设置如下:

下图为A、B、C三款相机在位置B点(距目标物约3.1米距离)的测试结果对比分析。
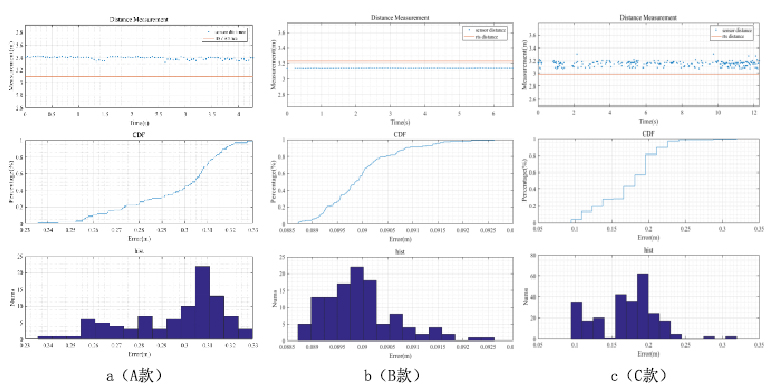
a、b、c每张图分别由Distance Measurement、CDF和hist三张数据分析图组成,Distance Measurement是在相同时间内真值与测量值的点分布图,CDF提供误差值的累计分布函数,hist是误差值分布的直方图。
选取10米范围内的四个随机点位置A、B、C、D轮流进行静态目标物距测量的误差均值和误差标准差如下表所示:
单位:米
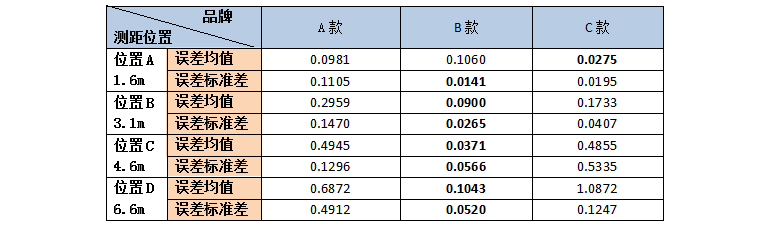
综上所述由本次实验性质的四组测试结果的误差均值和误差标准差分析可得,相同条件下B款相机的静态测距性能更优。本次测试结果能为科研选型、性能鉴定、应力筛选、产品设计方案优化,以及产品质量分析等问题提供参考;为医疗服务机器人、导引导览服务机器人、安防巡逻机器人等低速无人系统领域中基于视觉融合导航技术的科研单位进行研发选型;也可为产品供应商优化设计方案提供技术参数的对标测试服务。
目前我们无人系统测试试验场可提供标准测试、非标测试、复杂场景下的定制化测试、多场景测试数据集等整体测试解决方案。针对典型场景下低速无人系统的融合导航技术导航定位、环境感知、规划控制等性能指标提供精确测量及性能评估,逐步形成相关测试标准与测试服务能力。
双目立体视觉测距首先使用相机拍摄图像进行匹配,根据匹配得出的视差图算出目标物的距离。为更好帮助研发企业的开发人员选择相机设备,上海北斗导航创新研究院和上海西虹桥导航技术有限公司联合开展了业内产品的评测,在自有“高精度智能无人系统融合导航测试试验场”(以下简称测试试验场)随机选取了业内知名公司的三款双目视觉相机进行功能和性能测试。
▲LeadSense(N1)

▲ZED

▲MYNT(深度版120°)
本次测试只显示此三款相机的基本功能及静态目标测距误差分析,如下所示: 基本功能测试
静态目标测距
将三款相机分别固定安装在直线导轨上,正前方摆放目标物,然后分别对三款相机进行目标物的静态测距试验。 每款相机随机选取4个不同距离1.6m、3.1m、4.6m、6.6m轮流进行测试,最后将从相机SDK中获取的值(通过相机的点云图获取距离值)与高精度光学动态捕捉系统的真值进行比对,同时每次测试前真值设备与相机都会进行一次时间同步和坐标系统一。
▲直线轨道测试台
三款相机的真值标定原点统一固定于相机的左目摄像头上方。
▲视觉相机测试场景图
测试时各个相机的参数的设置如下:
下图为A、B、C三款相机在位置B点(距目标物约3.1米距离)的测试结果对比分析。
a、b、c每张图分别由Distance Measurement、CDF和hist三张数据分析图组成,Distance Measurement是在相同时间内真值与测量值的点分布图,CDF提供误差值的累计分布函数,hist是误差值分布的直方图。
选取10米范围内的四个随机点位置A、B、C、D轮流进行静态目标物距测量的误差均值和误差标准差如下表所示:
单位:米
综上所述由本次实验性质的四组测试结果的误差均值和误差标准差分析可得,相同条件下B款相机的静态测距性能更优。本次测试结果能为科研选型、性能鉴定、应力筛选、产品设计方案优化,以及产品质量分析等问题提供参考;为医疗服务机器人、导引导览服务机器人、安防巡逻机器人等低速无人系统领域中基于视觉融合导航技术的科研单位进行研发选型;也可为产品供应商优化设计方案提供技术参数的对标测试服务。
目前我们无人系统测试试验场可提供标准测试、非标测试、复杂场景下的定制化测试、多场景测试数据集等整体测试解决方案。针对典型场景下低速无人系统的融合导航技术导航定位、环境感知、规划控制等性能指标提供精确测量及性能评估,逐步形成相关测试标准与测试服务能力。